
robomaster泓龙电控组
此处是泓龙战队电控组的开源仓库,用于新生快速上手和内部交流
—— 战队的传承与技术突破同等重要
[TOC]
文件结构
快速入门
开发环境篇——部署
作为大家接触的第一个IDE,keil伴随着很多人度过了单片机的学习岁月。然而其20世纪的UI界面,缺少的代码补全、高亮和静态检查等功能,以及极慢的编译速度,一直为人诟病
如今,涌现出的VSCode,Clion等现代化的IDE,凭借着丰富的插件生态,AI支持,以及终于赏心悦目UI界面,获得越来越多开发者的支持。!在现代化开发工具支持下,将极大提高电控开发效率和调试效率
值得注意的是,keil作为ARM的亲生编译器,其开源支持,行业地位仍不可撼动。在转向现代 编译器开发时,不应完全丢下keil,其完全体的ARM调试功能仍无法替代。使用keil时,建议升级版本至V5.40
VScode基本使用
如前所述,VSCode本身只是一个编辑器,它不直接具备编译和调试等各种功能,在此,我们安装插件来使他成为这宇宙第一编译器
- C/C++:提供C/C++的调试和代码高亮支持
- Better C++ Syntax:提供更丰富的代码高亮和智能提示
- C/C++ Snippets:提供代码块(关键字)补全
- Embedded IDE:提供后续工程所在的环境,安装后Eide会自动下载一些依赖,没安装NET.6的也会自动安装,注意确认即可
- Cortex-Debug,Cortex-Debug: Device Support Pack - STM32F4:提供调试支持
- IntelliCode,Makfile Tools:提供代码高亮支持。喜欢clang的同学可以使用clangd。
同时,VSCode也提供了许多方便的的快捷键,常用快捷键包括:
| 功能 | 快捷键 |
|---|---|
| 选中当前行 | Ctrl+L |
| 删除当前行 | Ctrl+Shift+K |
| 重命名变量 | F2 |
| 跳转到定义 | Ctrl+点击 |
| 在打开的文件页中切换 | Ctrl+Tab |
| 在当前文件查找 | Ctrl+F |
| 在整个项目文件夹中查找 | Ctrl+Shift+F |
| 查找所有引用 | Alt+Shift+F12 |
| 返回上一动作 | Alt+左 |
更多快捷键可以按ctrl+K再按ctrl+S显示,并且可以修改成你最习惯的方式,接下来进入编译环境的安装
拉取代码仓库
- 下载安装git
sudo apt-get install git #Linux
winget install --id Git.Git -e --source winget #Windows- 拉取战队代码
git clone https://gitee.com/clbw2005/honglong2025.gitVSCode+Eide
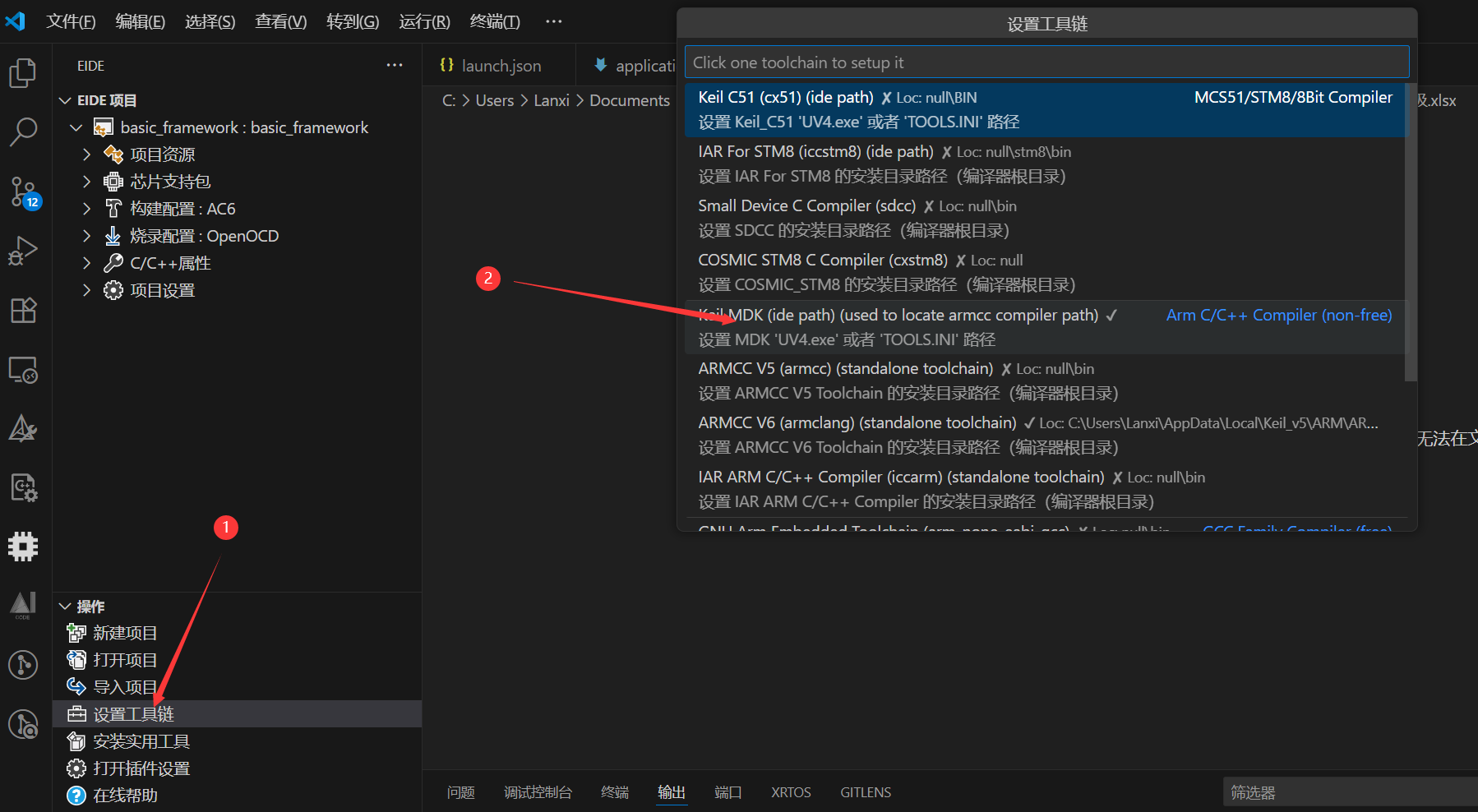
- Windows MDK
安装openocd
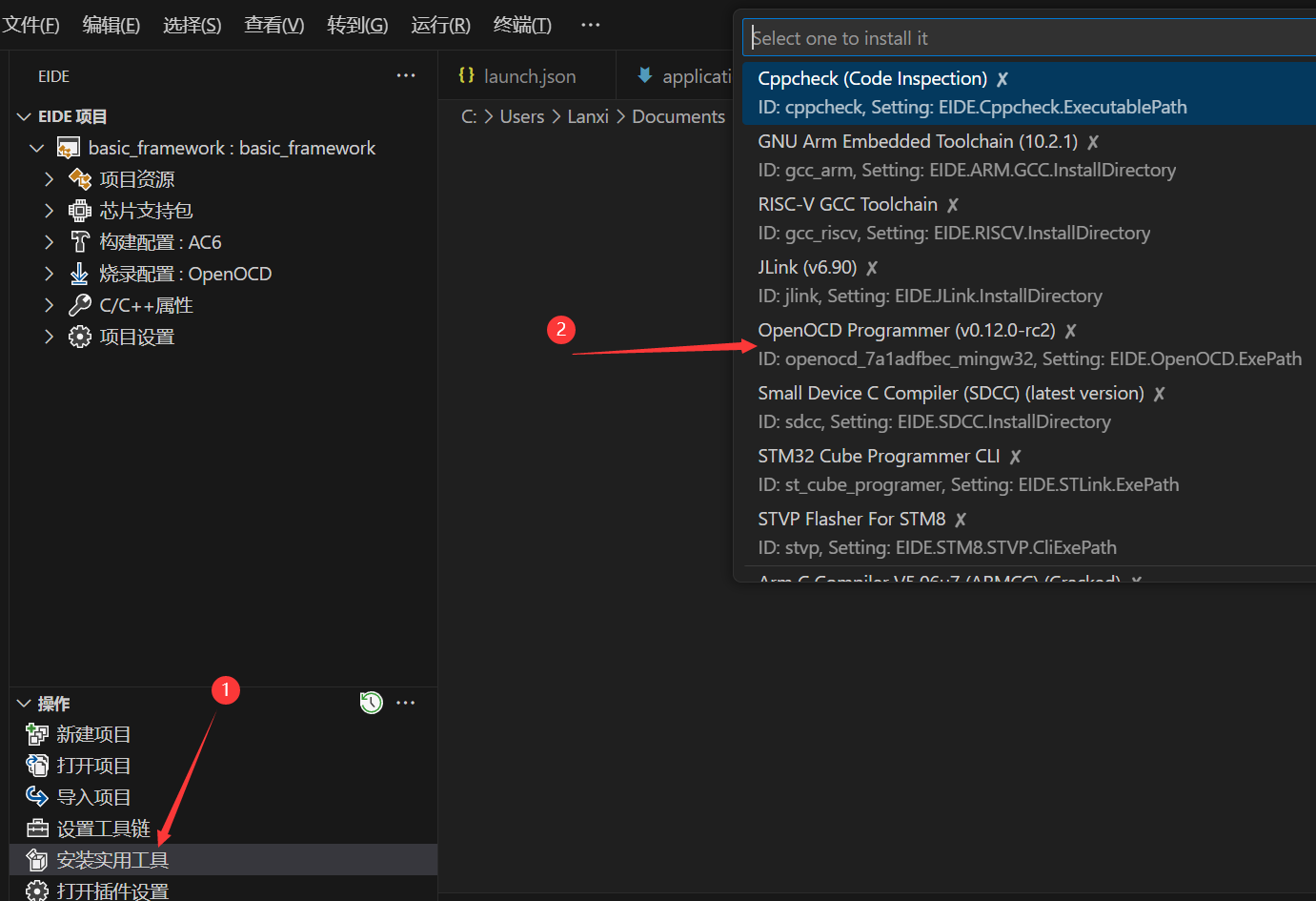
下载keil V5.40以上版本并激活,填入MDK路径即可
- Linux arm-none-eabi-gcc
使用apt下载将自动配置好环境变量
sudo apt install gcc-arm-none-eabi #工具链
sudo apt install make cmake #构建器
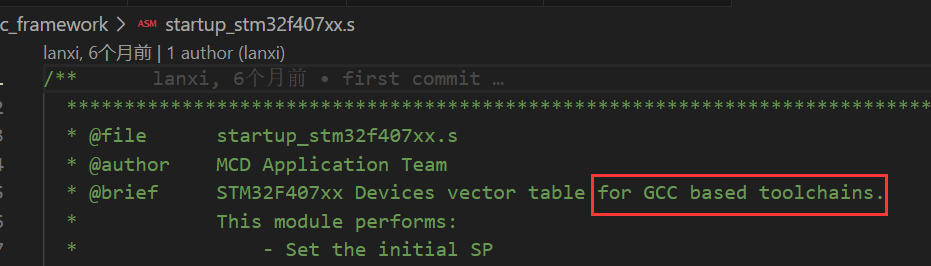
sudo apt install openocd #下载器更换启动文件(.s),直接覆盖即可
启动文件针对keil和gcc有两个版本但名字是一样的,注意区分
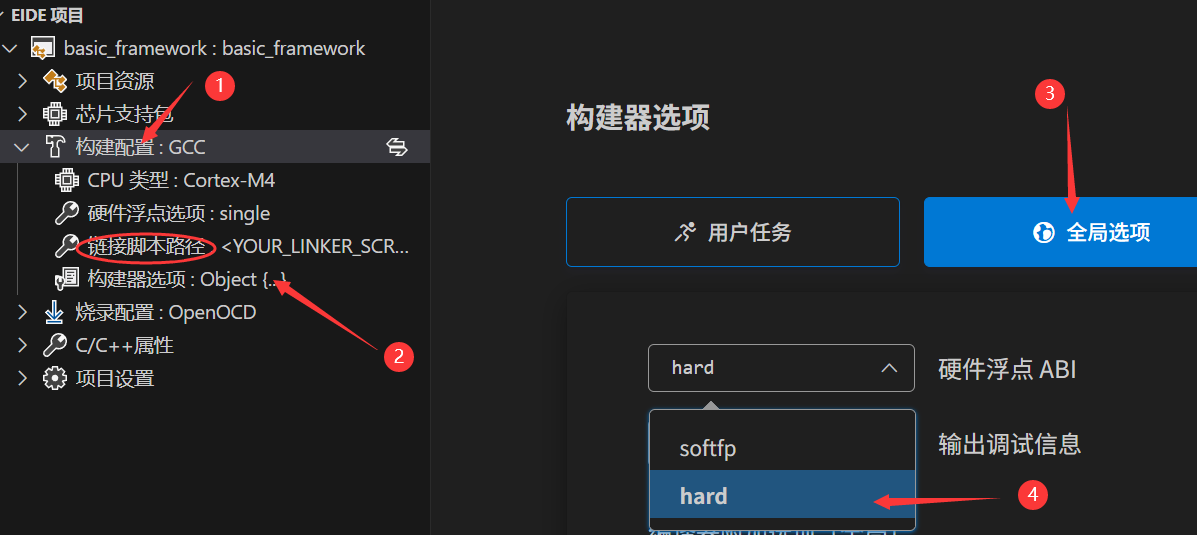
填入链接脚本(.ld)路径,勾选硬件浮点
windows 同样可用arm-gcc,使用MinGW下载ARM工具链并配置环境变量即可,其他步骤相同
更多详情可见[VSCode+Ozone使用方法.md](.Doc/VSCode+Ozone使用方法.md · HNUYueLuRM/basic_framework - Gitee.com)
VSCode+CMake
终端 切换到 build 目录,运行
cd build
cmake.. && makeGDB调试
环境问题报错合集
代码阅读与使用
战队目前使用的是湖南大学跃鹿战队的开源电控框架,其规范的bsp,model,application分层,使得代码结构清晰,层级分明。同时还有仿造ROS的发布订阅机制用于应用间的通信,使得代码耦合度大大下降,复用率高。提高了开发效率。 跃鹿原版readme
技术培训
考核包含内容,入队后将默认掌握
- C语言基础
- GPIO,TIM,中断
- 通信(串口)
电控组的必备小常识
- 基础的电子常识
- 一口气搞懂计算机网络
嵌入式基础
战队目前使用的mcu仍然是以stm32f407(c板)为主,后续可能会使用H732(喵板)。现阶段仅要求对stm32hal库的掌握,其他开发板可自行学习扩展技能树,但其内容万变不离其宗,一通即可百通。
深入前面内容的学习并着重掌握
- DMA的使用
- CAN通信
使用DSP库
在F407中,意法半导体提供了专门的硬件加速库arm_math.h,它特别的对于stm32底层硬件做了优化,以至于较我们之前学c阶段使用的math.h大大提高运算速度。因而应当习惯于将平时计算的函数替换为arm所提供的函数。
- DSP库的导入
FreeRtos的基本使用
在前面的单片机的学习中我们清楚的知道并体会了Mcu是单核单线程的运行,以至需要我们不断的去调用中断来满足一些高实时性需求。但中断的触发往往不够可控。使得程序运行的顺序到处乱跳。因此在面临一个较大工程时,仅仅靠中断来满足需求便有点力不从心了。所以我们在此引入Rtos(Real Time os)实时操作系统。
和我们所熟知的Windows,Linux 一样,Rtos是作用于mcu上的操作系统。它通过时间片轮询的方式,实现了多线程的操作。创建的Task之间同时运行,可理解为我们拥有了多个之前裸机开发时的main()函数,程序在里面反复的循环运行。
- 任务的创建
算法
算法层面,一方面是控制算法,一方面则是数据处理的算法。电控的最终目的始终是为了控制,而这两者之间往往又是相互依存的
PID
PID在控制算法中的地位不必多说,常言到PID解决95%的问题,真要遇上那最后5%不如直接压力机械(bushi)。
- 代码实现与调参
- PID的各种优化
卡尔曼滤波(EKF)
递归最小二乘法(RLS)
重要文档
参考开源
排名不分先后
华南理工大学 华南虎战队 电控开源SRML库
吉林大学 TARS_Go战队 电控开源架构
防灾科技学院 思玄战队 超级电容功率控制算法
湖南大学 跃鹿战队 电控开源架构
青岛大学 XRobot战队 电控开源架构
中国科学技术大学 RoboWalker战队 功率控制算法 电控教程开源
哈尔滨工业大学(深圳校区) 南工骁鹰战队 电控框架开源